
Suite logistique
Pour les articles homonymes, voir Logistique (homonymie).
En mathématiques, une suite logistique est une suite réelle simple, mais dont la récurrence n'est pas linéaire. Sa relation de récurrence est
![{\displaystyle x_{n+1}=\mu \cdot x_{n}\cdot (1-x_{n}),~x_{0}\in [0;1].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cb459b8e4e66b61b2f9cf2c058a56a227badd21d)
Suivant la valeur du paramètre μ (dans [0; 4] pour assurer que les valeurs de x restent dans [0; 1]), elle engendre soit une suite convergente, soit une suite soumise à oscillations, soit une suite chaotique.
Souvent citée comme exemple de la complexité de comportement pouvant surgir d'une relation non linéaire simple, cette suite fut popularisée par le biologiste Robert May[1] en 1976. Une application de la suite logistique est la modélisation de la taille d'une population biologique au fil des générations.
Elle est la solution en temps discret du modèle de Verhulst. Le terme « logistique » provient de l'ouvrage de Pierre François Verhulst qui appelle courbe logistique la solution en temps continu de son modèle. Il écrit en 1845 dans son ouvrage consacré à ce phénomène : « Nous donnerons le terme de logistique à cette courbe ». L'auteur n'explique pas son choix mais « logistique » a la même racine que logarithme et logistikos signifie « calcul » en grec[2].
Comportement selon μ
[modifier | modifier le code]Dans le modèle logistique, nous considérerons que la variable notée ici xn désigne le rapport de la population d'une espèce sur la population maximale de cette espèce (c'est un nombre compris entre 0 et 1). En faisant varier le paramètre μ, plusieurs comportements différents sont observés :
- Cas 0 ≤ µ ≤ 1 : la population s'éteint.
L’espèce finira par mourir, quelle que soit la population de départ. Autrement dit, . - Cas 1 ≤ µ ≤ 3 : l'effectif de la population se stabilise.
- Si 1 ≤ µ ≤ 2, la population finit par se stabiliser autour de la valeur , quelle que soit la population initiale. Autrement dit .
- Si 2 ≤ µ ≤ 3, elle finit également par se stabiliser autour de après avoir oscillé autour pendant quelque temps. La vitesse de convergence est linéaire, sauf pour µ=3 où elle est très lente.
- Cas : l'effectif de la population oscille entre 2, 4, 8… valeurs (liste des puissances de 2).
- Si 3 < µ ≤ 1+√6 (environ 3,45), elle finit par osciller entre deux valeurs, dépendantes de µ mais pas de la population initiale.
- Si 3,45 < µ < 3,54 (environ), elle finit par osciller entre quatre valeurs, là encore dépendantes de µ mais pas de la population initiale.
- Si µ est légèrement plus grand que 3,54, la population finit par osciller entre huit valeurs, puis 16, 32, etc. La largeur de l’intervalle des valeurs de µ conduisant au même nombre d’oscillations décroît rapidement. Le rapport des largeurs entre deux de ces intervalles consécutifs se rapproche à chaque fois de la constante de Feigenbaum, δ = 4,669…. Aucun de ces comportements ne dépend de la population initiale.
- Cas 3,57 ≤ µ : l'effectif de la population est chaotique, sauf exception.
- Vers µ= 3,57, le chaos s’installe. Aucune oscillation n’est encore visible et de légères variations de la population initiale conduisent à des résultats radicalement différents.
- La plupart des valeurs au-delà de 3,57 présentent un caractère chaotique, mais il existe quelques valeurs isolées de µ avec un comportement qui ne l’est pas. Par exemple à partir de 1+√8 (environ 3,82), un petit intervalle de valeurs de µ présente une oscillation entre trois valeurs et pour µ légèrement plus grand, entre six valeurs, puis douze, etc. D’autres intervalles offrent des oscillations entre 5 valeurs, etc. Toutes les périodes d’oscillation sont présentes, là encore indépendamment de la population initiale.
- Au-delà de µ=4, le rapport de la population de l'espèce sur la population maximale quitte l’intervalle [0,1] et diverge quasiment pour toutes les valeurs initiales.




Les périodes d'oscillation précédemment décrites répondent à la règle suivante. Considérons l'ordre de Charkovski défini sur les entiers strictement positifs de la façon suivante :
-
- .
- Autrement dit, on place d'abord les impairs à partir de 3 par ordre croissant, puis les impairs multipliés par 2, puis par 4, etc. ; et on termine par les puissances de 2 par ordre décroissant. Si une valeur du paramètre µ correspond à une période d'oscillation n, alors tous entiers succédant à n dans l'ordre de Charkovski correspondent à des périodes d'oscillation déjà apparues pour des valeurs du paramètre inférieures à µ. Ainsi, puisque µ=3,82 correspond à une période 3, toutes les périodes d'oscillation possibles sont déjà apparues pour des valeurs de µ entre 0 et 3,82.


Un diagramme de bifurcation permet de résumer graphiquement les différents cas :

Commentaires
[modifier | modifier le code]Quelques raisonnements simples et quelques graphiques permettent d'éclairer partiellement les résultats qui précèdent.
Graphiques
[modifier | modifier le code]
L'évolution de la suite logistique peut être représentée dans le plan (xn, xn+1).
L'équation de base représente une parabole qui passe par les points d'abscisses 0 et 1 sur l'axe horizontal. Pour que les valeurs de xn+1 ne deviennent pas négatives, il faut ne retenir que l'arc compris entre ces deux points ; celui-ci présente, pour xn = 1⁄2, un maximum de valeur μ⁄4. Cette valeur doit aussi être comprise entre 0 et 1, d'où μ < 4.
Si la suite converge, sa limite satisfait l'équation lim xn+1 = lim xn. Cette limite éventuelle, notée x, est solution de l'équation du second degré

et peut donc prendre l'une ou l'autre des valeurs

Pour décrire le comportement de la suite, il faut partir d'une abscisse x0, déterminer sur la parabole la valeur x1 qui est alors transformée en une nouvelle abscisse en passant par la bissectrice xn+1 = xn et répéter ces deux opérations.
Domaines de convergence
[modifier | modifier le code]Pour certaines valeurs du paramètre μ, la suite se comporte comme une suite classique et converge vers l'une des deux limites possibles. L'équation de base peut se réécrire sous la forme

Si , la suite est majorée par une suite géométrique qui tend vers 0. Si , on peut montrer que quand tend vers l'infini, et donc la suite tend vers 0.





Pour voir le comportement vis-à-vis de la seconde limite éventuelle, il suffit d'effectuer le changement de variable xn = un + 1 - 1/μ. La formule devient :

Dans ce cas, la condition de convergence exige que le second membre soit compris entre -1 et + 1 : .

On vérifie que, si un est proche de la limite 1 - 1/μ, alors 1-μ un est proche de 2 - μ et un tend vers sa limite par valeurs croissantes si μ est inférieur à 2, par valeurs alternées s'il est supérieur à 2.
-
 μ = 0,95
μ = 0,95 -
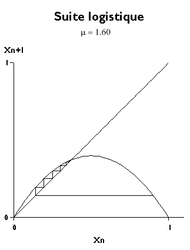 μ = 1,60
μ = 1,60 -
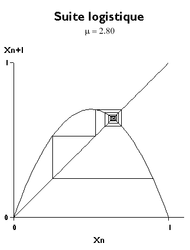 μ = 2,80
μ = 2,80



Bifurcations
[modifier | modifier le code]Dans le paragraphe précédent, la formule de récurrence de la forme xn+1 = f(xn) a permis d'obtenir les premiers attracteurs en cherchant une limite éventuelle conforme à l'équation x = f(x).
Lorsque μ devient supérieur à 3, il faut chercher une solution à l'équation x = f(f(x)). Cela conduit à une équation du quatrième degré qui possède naturellement les racines déjà connues — mais ce ne sont plus des attracteurs — et la paire de nouvelles racines


Il n'y a plus de convergence : un cycle-limite apparaît. Le résultat de l'itération bascule alternativement de l'une des deux dernières racines à l'autre : un+1 =un-1 tandis que un+2 =un. Pour μ = 3.4, les valeurs approchées successives 0.84, 0.45, 0.84, 0.45, 0.84.... apparaissent.
Au-delà de la limite de stabilité de ce cycle, √6 + 1, deux nouvelles bifurcations se produisent, qui dépendent des solutions de x = f(f(f(f(x)))). Pour μ = 3.47, les valeurs successives sont de l'ordre de 0.47, 0.86, 0.40, 0.84, 0.47...
-
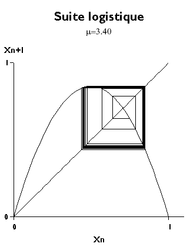 μ = 3,40
μ = 3,40 -
 μ = 3,47
μ = 3,47


Chaos
[modifier | modifier le code]De bifurcation en bifurcation, les évolutions deviennent de plus en plus complexes. Le processus aboutit, pour μ > 3.57 environ, à des systèmes qui ne présentent généralement plus d'attracteurs visibles. Les graphiques représentent alors une évolution « chaotique » au sens usuel du terme.
Cependant, dans le langage des mathématiciens, le mot chaos représente une forte sensibilité aux conditions initiales. Les deux graphiques correspondant à μ = 3.9 avec des valeurs initiales u0 0.100 et 0.101 montrent que les trajectoires s'éloignent l'une de l'autre jusqu'à devenir rapidement distinctes. Dans un problème concret les conditions initiales ne sont jamais connues exactement : au bout d'un certain temps, un phénomène chaotique est devenu imprévisible alors même que la loi qui le définit est parfaitement déterministe.
-
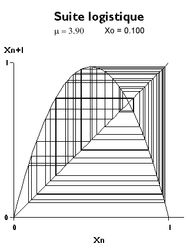 μ = 3,90 ; u0 = 0,1
μ = 3,90 ; u0 = 0,1 -
 μ = 3,90 ; u0 = 0,101
μ = 3,90 ; u0 = 0,101


Notes et références
[modifier | modifier le code]- (en) R. M. May, « Simple mathematical models with very complicated dynamics », Nature, vol. 261, no 5560, , p. 459–467 (DOI 10.1038/261459a0)
- (en) Why logistic ogive and not autocatalytic curve?
Annexes
[modifier | modifier le code]Bibliographie
[modifier | modifier le code]- Alain Hillion, Les Théories mathématiques des populations, Paris, Presses universitaires de France, coll. « Que sais-je », , 127 p., n°2258 (ISBN 2-13-039193-1)
- Nicolas Bacaër, Histoires de mathématiques et de populations, Paris, Éditions Cassini, coll. « Le sel et le fer », , 212 p. (ISBN 978-2-84225-101-7, BNF 42035729), « Verhulst et l'équation logistique »
Articles connexes
[modifier | modifier le code]- Système dynamique
- Théorie du chaos
- Théorie ergodique
- Fractale de Liapounov
- Rétroaction, Autorégulation
Liens externes
[modifier | modifier le code]- (en) Elmer G. Wiens, The Logistic Map and Chaos
- [PDF] Daniel Perrin, La Suite logistique et le chaos
- (fr) Expérience numérique interactive du diagramme de bifurcation de l'application logistique http://experiences.math.cnrs.fr